![]()
FCR伏び位置探査についてご説明します。
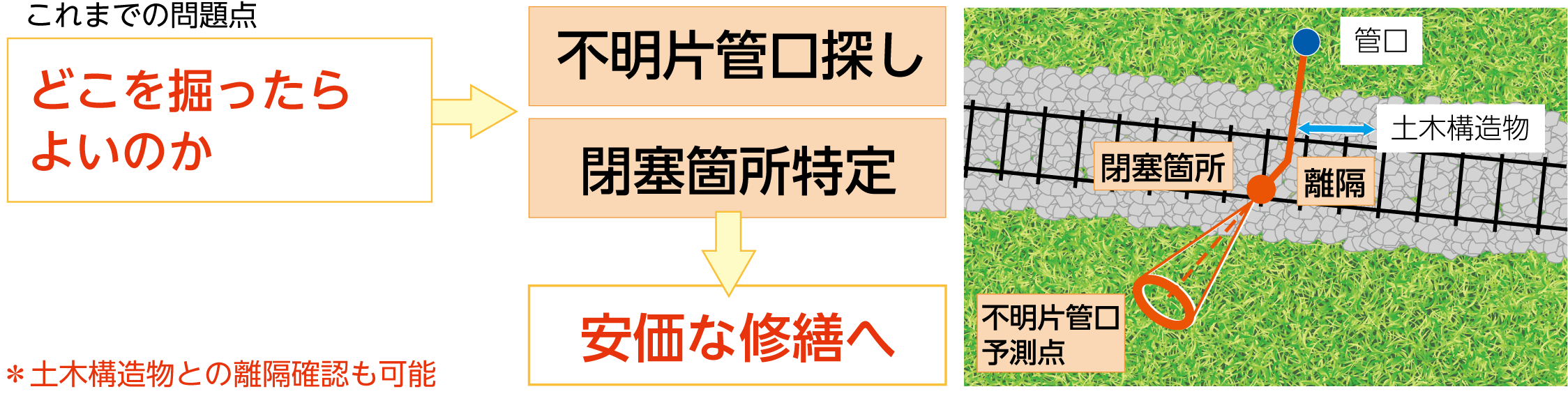
片管口しかわからない場合、経路を特定し不明片管口の位置を推定し、不明片管口掘削、しゅんせつ、補修へ進めることができます。
また、途中に閉塞箇所がある場合、その位置を特定し、短時間での開削補修を支援します。
伏び位置探査の狙い
コースの選択

![]()
片管口しかわからない場合、経路を特定し不明片管口の位置を推定し、不明片管口掘削、しゅんせつ、補修へ進めることができます。
また、途中に閉塞箇所がある場合、その位置を特定し、短時間での開削補修を支援します。
